
Полезная мощность на валу асинхронного двигателя

Ðàáî÷èå õàðàêòåðèñòèêè àñèíõðîííîãî äâèãàòåëÿ ïðåäñòàâëÿþò ñîáîé ãðàôè÷åñêè âûðàæåííûå çàâèñèìîñòè ÷àñòîòû âðàùåíèÿ n2, ÊÏÄ η, ïîëåçíîãî ìîìåíòà (ìîìåíòà íà âàëó) Ì2, êîýôôèöèåíòà ìîùíîñòè cos φ, è òîêà ñòàòîðà I1 îò ïîëåçíîé ìîùíîñòè Ð2 ïðè U1 = const f1 = const.
Ñêîðîñòíàÿ õàðàêòåðèñòèêà n2 = f(P2). ×àñòîòà âðàùåíèÿ ðîòîðà àñèíõðîííîãî äâèãàòåëÿ n2 = n1(1 — s).
Ñêîëüæåíèå s = Pý2/Pýì, ò. å. ñêîëüæåíèå àñèíõðîííîãî äâèãàòåëÿ, à ñëåäîâàòåëüíî, è åãî ÷àñòîòà âðàùåíèÿ îïðåäåëÿþòñÿ îòíîøåíèåì ýëåêòðè÷åñêèõ ïîòåðü â ðîòîðå ê ýëåêòðîìàãíèòíîé ìîùíîñòè. Ïðåíåáðåãàÿ ýëåêòðè÷åñêèìè ïîòåðÿìè â ðîòîðå â ðåæèìå õîëîñòîãî õîäà, ìîæíî ïðèíÿòü Ðý2 = 0, à ïîýòîìó s ≈ 0 è n20 ≈ n1.
Ïî ìåðå óâåëè÷åíèÿ íàãðóçêè íà âàëó àñèíõðîííîãî äâèãàòåëÿ îòíîøåíèå s = Pý2/Pýì ðàñòåò, äîñòèãàÿ çíà÷åíèé 0,01 — 0,08 ïðè íîìèíàëüíîé íàãðóçêå.  ñîîòâåòñòâèè ñ ýòèì çàâèñèìîñòü n2 = f(P2) ïðåäñòàâëÿåò ñîáîé êðèâóþ, ñëàáî íàêëîíåííóþ ê îñè àáñöèññ. Îäíàêî ïðè óâåëè÷åíèè àêòèâíîãî ñîïðîòèâëåíèÿ ðîòîðà äâèãàòåëÿ r2′ óãîë íàêëîíà ýòîé êðèâîé óâåëè÷èâàåòñÿ.  ýòîì ñëó÷àå èçìåíåíèÿ ÷àñòîòû àñèíõðîííîãî äâèãàòåëÿ n2 ïðè êîëåáàíèÿõ íàãðóçêè Ð2 âîçðàñòàþò. Îáúÿñíÿåòñÿ ýòî òåì, ÷òî ñ óâåëè÷åíèåì r2′ âîçðàñòàþò ýëåêòðè÷åñêèå ïîòåðè â ðîòîðå.
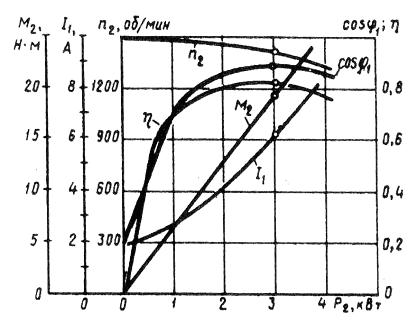
Ðèñ. 1. Ðàáî÷èå õàðàêòåðèñòèêè àñèíõðîííîãî äâèãàòåëÿ äâèãàòåëÿ
Çàâèñèìîñòü Ì2 =f(P2). Çàâèñèìîñòü ïîëåçíîãî ìîìåíòà íà âàëó àñèíõðîííîãî äâèãàòåëÿ Ì2 îò ïîëåçíîé ìîùíîñòè Ð2 îïðåäåëÿåòñÿ âûðàæåíèåì M2 = Ð2/ ω2 = 60 P2/ (2πn2) = 9,55Ð2/ n2,
ãäå Ð2 ïîëåçíàÿ ìîùíîñòü, Âò; ω2 = 2πf 2/ 60 óãëîâàÿ ÷àñòîòà âðàùåíèÿ ðîòîðà.
Èç ýòîãî âûðàæåíèÿ ñëåäóåò, ÷òî åñëè n2 = const, òî ãðàôèê Ì2 =f2(Ð2) ïðåäñòàâëÿåò ñîáîé ïðÿìóþ ëèíèþ. Íî â àñèíõðîííîì äâèãàòåëå ñ óâåëè÷åíèåì íàãðóçêè Ð2 ÷àñòîòà âðàùåíèÿ ðîòîðà óìåíüøàåòñÿ, à ïîýòîìó ïîëåçíûé ìîìåíò íà âàëó Ì2 ñ óâåëè÷åíèåì íàãðóçêè âîçðàñòàåò íå ñêîëüêî áûñòðåå íàãðóçêè, à ñëåäîâàòåëüíî, ãðàôèê Ì2 =f (P2) èìååò êðèâîëèíåéíûé âèä.
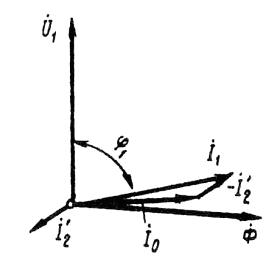
Ðèñ. 2. Âåêòîðíàÿ äèàãðàììà àñèíõðîííîãî äâèãàòåëÿ ïðè íåáîëüøîé íàãðóçêå
Çàâèñèìîñòü cos φ1 = f (P2).  ñâÿçè ñ òåì ÷òî òîê ñòàòîðà àñèíõðîííîãî äâèãàòåëÿ I1 èìååò ðåàêòèâíóþ (èíäóêòèâíóþ) ñîñòàâëÿþùóþ, íåîáõîäèìóþ äëÿ ñîçäàíèÿ ìàãíèòíîãî ïîëÿ â ñòàòîðå, êîýôôèöèåíò ìîùíîñòè àñèíõðîííûõ äâèãàòåëåé ìåíüøå åäèíèöû. Íàèìåíüøåå çíà÷åíèå êîýôôèöèåíòà ìîùíîñòè ñîîòâåòñòâóåò ðåæèìó õîëîñòîãî õîäà. Îáúÿñíÿåòñÿ ýòî òåì, ÷òî òîê õîëîñòîãî õîäà ýëåêòðîäâèãàòåëÿ I0 ïðè ëþáîé íàãðóçêå îñòàåòñÿ ïðàêòè÷åñêè íåèçìåííûì. Ïîýòîìó ïðè ìàëûõ íàãðóçêàõ äâèãàòåëÿ òîê ñòàòîðà íåâåëèê è â çíà÷èòåëüíîé ÷àñòè ÿâëÿåòñÿ ðåàêòèâíûì (I1 ≈ I0).  ðåçóëüòàòå ñäâèã ïî ôàçå òîêà ñòàòîðà îòíîñèòåëüíî íàïðÿæåíèÿ ïîëó÷àåòñÿ çíà÷èòåëüíûì (φ1 ≈ φ0), ëèøü íåìíîãèì ìåíüøå 90° (ðèñ. 2).
Êîýôôèöèåíò ìîùíîñòè àñèíõðîííûõ äâèãàòåëåé â ðåæèìå õîëîñòîãî õîäà îáû÷íî íå ïðåâûøàåò 0,2. Ïðè óâåëè÷åíèè íàãðóçêè íà âàëó äâèãàòåëÿ ðàñòåò àêòèâíàÿ ñîñòàâëÿþùàÿ òîêà I1 è êîýôôèöèåíò ìîùíîñòè âîçðàñòàåò, äîñòèãàÿ íàèáîëüøåãî çíà÷åíèÿ (0,80 — 0,90) ïðè íàãðóçêå, áëèçêîé ê íîìèíàëüíîé. Äàëüíåéøåå óâåëè÷åíèå íàãðóçêè íà âàëó äâèãàòåëÿ ñîïðîâîæäàåòñÿ óìåíüøåíèåì cos φ1 ÷òî îáúÿñíÿåòñÿ âîçðàñòàíèåì èíäóêòèâíîãî ñîïðîòèâëåíèÿ ðîòîðà (x2s) çà ñ÷åò óâåëè÷åíèÿ ñêîëüæåíèÿ, à ñëåäîâàòåëüíî, è ÷àñòîòû òîêà â ðîòîðå.
 öåëÿõ ïîâûøåíèÿ êîýôôèöèåíòà ìîùíîñòè àñèíõðîííûõ äâèãàòåëåé ÷ðåçâû÷àéíî âàæíî, ÷òîáû äâèãàòåëü ðàáîòàë âñåãäà èëè ïî êðàéíåé ìåðå çíà÷èòåëüíóþ ÷àñòü âðåìåíè ñ íàãðóçêîé, áëèçêîé ê íîìèíàëüíîé. Ýòî ìîæíî îáåñïå÷èòü ëèøü ïðè ïðàâèëüíîì âûáîðå ìîùíîñòè äâèãàòåëÿ. Åñëè æå äâèãàòåëü ðàáîòàåò çíà÷èòåëüíóþ ÷àñòü âðåìåíè íåäîãðóæåííûì, òî äëÿ ïîâûøåíèÿ cos φ1, öåëåñîîáðàçíî ïîäâîäèìîå ê äâèãàòåëþ íàïðÿæåíèå U1 óìåíüøèòü. Íàïðèìåð, â äâèãàòåëÿõ, ðàáîòàþùèõ ïðè ñîåäèíåíèè îáìîòêè ñòàòîðà òðåóãîëüíèêîì, ýòî ìîæíî ñäåëàòü ïåðåñîåäèíèâ îáìîòêè ñòàòîðà â çâåçäó, ÷òî âûçîâåò óìåíüøåíèå ôàçíîãî íàïðÿæåíèÿ â ðàç. Ïðè ýòîì ìàãíèòíûé ïîòîê ñòàòîðà, à ñëåäîâàòåëüíî, è íàìàãíè÷èâàþùèé òîê óìåíüøàþòñÿ ïðèìåðíî â ðàç. Êðîìå òîãî, àêòèâíàÿ ñîñòàâëÿþùàÿ òîêà ñòàòîðà íåñêîëüêî óâåëè÷èâàåòñÿ. Âñå ýòî ñïîñîáñòâóåò ïîâûøåíèþ êîýôôèöèåíòà ìîùíîñòè äâèãàòåëÿ.
Íà ðèñ. 3 ïðåäñòàâëåíû ãðàôèêè çàâèñèìîñòè cos φ1, àñèíõðîííîãî äâèãàòåëÿ îò íàãðóçêè ïðè ñîåäèíåíèè îáìîòîê ñòàòîðà çâåçäîé (êðèâàÿ 1) è òðåóãîëüíèêîì (êðèâàÿ 2).
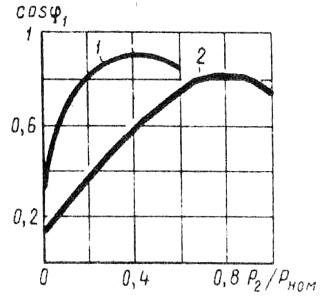
Ðèñ. 3. Çàâèñèìîñòü cos φ1,îò íàãðóçêè ïðè ñîåäèíåíèè îáìîòêè ñòàòîðà äâèãàòåëÿ çâåçäîé (1) è òðåóãîëüíèêîì (2)

Источник
ПРАКТИЧЕСКАЯ РАБОТА №8
«Расчет рабочих характеристик асинхронного двигателя»
ЦЕЛЬ РАБОТЫ: построить упрощенную круговую диаграмму трехфазного асинхронного двигателя и определить параметры, соответствующие его номинальному режиму работы.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ:
Рабочие характеристики асинхронного двигателя (рис. 8.1) представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
s = Pэ2/ Pэм, (8.1), т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности Рэм. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1.
Рис. 8.1. Рабочие характеристики асинхронного двигателя

По мере увеличения нагрузки на валу двигателя отношение (8.1) растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Зависимость М2 =f(P2). Зависимость полезного момента на валу двигателя М2 от полезной мощности Р2 определяется выражением
M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2, (8.2)
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
Рис. 8.2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке
Зависимость cosφ1 = f (P2). В связи с тем что ток статора I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х. I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора , относительно напряжения , получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 8.2). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2.
Рис. 8.3. Зависимость cos φ1,от нагрузки при соединении обмотки статора звездой (1) и треугольником (2)
При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увелиичение нагрузки сопровождается уменьшением cosφ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cosφ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 8.3 представлены графики зависимости cosφ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
Решить задачу №1. По рабочим характеристикам трехфазных асинхронных двигателей, приведенным в Приложении, и данным табл. 8.1 по каждому из предлагаемых вариантов требуется определить:
а) параметры двигателя в номинальном режиме работы — ток статора I1ном, КПД ηном, коэффициент мощности cos φном, скольжение sном, частоту вращения nном, потребляемую мощность Р1ном;
б) максимальное значение КПД ηmах и соответствующие этому КПД нагрузку Р2, выразив ее в долях от номинальной Рном;
в) отношение переменных потерь Рпер.ном к постоянным потерям Рпост при номинальной нагрузке;
г) активное сопротивление фазы обмотки статора rх.
Таблица 8.1.
Параметр
Варианты
1
2
3
4
5
6
Рисунок (см. приложение 2)
П. 2.1
П. 2.2
П. 2.3
П. 2.4
П. 2.5
П. 2.6
Рном , кВт
250
2,8
7,5
160
4,0
45
Напряжение сети U1л, В
660
220
380
380
220
380
Схема соединения обмотки статора
Y
Δ
Y
Δ
Δ
Y
2 р
4
4
4
4
4
4
Решение:
определить параметры двигателя при номинальном режиме (см. рис. П. 2.1 ): полезную мощность двигателя Рном , ток статора I1ном ,скольжение sном , частоту вращения пном , коэффициент полезного действия ηном , коэффициент мощности cos φ1ном , потребляемая мощность Р1ном= Рном / η;
определить максимальное значение КПД ηmах соответствует нагрузке Р2 = 150 0,6Рном (см. рис. П.2.1).
определить потребляемую двигателем мощность при нагрузке 0,6Рном : Р1/ηmах;
определить сумму потерь при нагрузке 0,6Рном :
 ;
;определить величину постоянных потерь:
 ;
;определить суммарные потери двигателя при номинальной нагрузке:
 ;
;определить переменные потери в режиме номинальной нагрузки:
 ;
;определить отношение переменных потерь к постоянным при номинальной нагрузке:
 ;
;определить добавочные потери при номинальной нагрузке:
 ;
;определить момент холостого хода:
 ;
;определить номинальный момент на валу двигателя:
 ;
;определить электромагнитный момент в номинальном режиме:
 ;
;определить электромагнитную мощность в номинальном режиме:
 ;
;определить величину электрических потерь в обмотке ротора в режиме номинальной нагрузки:
 ;
;определить величину электрических потерь в обмотке статора в режиме номинальной нагрузки:
 ;
;определить активное сопротивление фазы обмотки статора:
 .
.
Решить задачу №2. Построить упрощенную круговую диаграмму трехфазного асинхронного двигателя и определить параметры, соответствующие его номинальному режиму работы. Необходимые для построения диаграммы данные приведены в табл. 8.2: номинальная мощность Рном; напряжение на обмотке статора (фазное) U1ф; номинальный ток статора (фазный) I1ф; число полюсов 2р; активное сопротивление фазной обмотки статора при рабочей температуре rx; ток холостого хода (фазный) I0ф; мощность холостого хода Р0; мощность идеального холостого хода
 механические потери Рмех; коэффициент мощности холостого хода сos φ0; мощность короткого замыкания Рк; напряжение короткого замыкания (фазное) UK; коэффициент мощности короткого замыкания cos φк; частота тока 50 Гц.
механические потери Рмех; коэффициент мощности холостого хода сos φ0; мощность короткого замыкания Рк; напряжение короткого замыкания (фазное) UK; коэффициент мощности короткого замыкания cos φк; частота тока 50 Гц.
Таблица 8.2.
Параметр
Варианты
1
2
3
4
5
6
Рном, кВт
3,0
12
70
22
250
16
U1ф, В
220
220
220
220
1730
220
I1ф, А
6,3
25
190
54
60
40
2 р
4
4
4
8
6
8
r1ф, Ом
1,7
0,32
0,035
0,15
0,68
0,15
I0ф , А
1,83
9,7
55
32,8
17,5
9,6
Р, Вт
300
565
6500
1340
10 750
950
Р’, Вт
283
475
6180
1120
10125
890
Рмех,ВТ
200
250
600
370
1350
270
сos φ0
0,24
0,10
0,20
0,064
0,12
0,15
Рк,Вт
418
1780
9500
2360
12 160
1740
Uк.ф,В
59,5
57,8
58,0
44,0
360
42,0
cos φк
0,37
0,34
0,30
0,33
0,25
0,34
Решение:
определить углы фазового сдвига токов холостого хода
 и короткого замыкания
и короткого замыкания  относительно напряжения
относительно напряжения  (рис. 8.1): φ0=arccos(сos φ0), φк=arccos(сos φк);
(рис. 8.1): φ0=arccos(сos φ0), φк=arccos(сos φк);определить ток короткого замыкания (фазный), приведенный к номинальному напряжению:
 ;
;принять масштаб тока исходя из размеров листа бумаги, на котором предполагается построение диаграммы; например, если применяется лист форматом А4 (210 х 297 мм), то масштаб тока m1=0,1 А/мм;
определить длину векторов тока: холостого хода —
 ; номинального тока статора —
; номинального тока статора —  ; тока короткого замыкания — ;
; тока короткого замыкания — ;определить масштабы мощности и момента:
 ;
; ;
;на оси ординат из точки О построить вектор напряжения U1ф произвольной длины и под углом φ0 к оси ординат строим вектор тока холостого хода ОН и под углом φк строим вектор тока короткого замыкания ОК;
из точки Н параллельно оси абсцисс провести прямую, на которой отложить отрезок НС, равный диаметру окружности токов
 , где
, где  ;
;из точки O1, лежащей посередине диаметра окружности, радиусом НС/2 провести полуокружность токов. При этом точки Н и К оказываются на этой полуокружности. Соединить точки Н и К и получить линию полезной мощности НК;
на окружности токов отметить точку D1 (точка номинального режима нагрузки двигателя). Для этого из точки О отложить отрезок OD1;
на средней части отрезка О1С отметить точку F, в которой восстановить перпендикуляр к диаметру НС. На этом перпендикуляре отметить отрезок
 ;
;из точки Н через точку Fl провести прямую до пересечения с окружностью токов в точке Т, соответствующей скольжению s— ±. Полученная линия НТ является линией электромагнитной мощности (момента);
из точки O1, опустить перпендикуляр на линию НТ и продолжить его до пересечения с окружностью токов в точке Е. Полученная таким образом точка Е соответствует максимальному моменту, так как отрезок ENв масштабе моментов представляет собой максимальный момент двигателя, а отношение отрезков
 — перегрузочную способность двигателя;
— перегрузочную способность двигателя;точка D1на окружности токов соответствует режиму номинальной нагрузки двигателя. Прямоугольный треугольник OD1aпредставляет собой треугольник токов: сторона OD1 — номинальный ток статора (см. п. 4), сторона D1a — активная составляющая тока статора, сторона Оа — реактивная (индуктивная) составляющая тока статора.
для определения коэффициента мощности двигателя сos φ1 сделать дополнительные построения: на оси ординат радиусом 50 мм провести полуокружность, а линию OD1 продолжить до пересечения с этой полуокружностью в точке h. Отношение отрезка Oh к диаметру полуокружности определяет значение коэффициента мощности в режиме номинальной нагрузки:
 ;
;для определения скольжения и частоты вращения ротора двигателя также необходимы дополнительные построения: из точки Н параллельно оси ординат провести линию HQ, затем из точки Qпараллельно линии электромагнитной мощности НТ провести линию до пересечения с продолжением линии полезной мощности НК в точке L. Полученная таким образом линия QL представляет собой шкалу скольжения: в точке холостого хода Н скольжение s = 0, а в точке короткого замыкания К скольжение s= 1. Продолжив отрезок HD1 до пересечения со шкалой скольжения, получится на шкале скольжения точка s1 которая определит скольжение двигателя в режиме номинальной нагрузки, частота вращения при этом равна
 ;
;проверить значение номинальной мощности двигателя по формуле:
 ;
;определить потребляемую в номинальном режиме мощность:
 ;
;определить КПД двигателя в номинальном режиме:
 ;
;определить электромагнитный момент в номинальном режиме:
 .
.
Решить задачу №3. Используя значения параметров трехфазных асинхронных двигателей, приведенные в таблице 8.3 (см. табл. 8.4), рассчитать параметры и построить рабочие характеристики асинхронного двигателя: I1 М2, n2, сos φ1, η= f(Р2). При этом можно воспользоваться либо упрощенной круговой диаграммой, построенной при решении задачи №2, либо применить аналитический метод расчета рабочих характеристик.
Решение аналитическим методом:
определить активную и реактивную составляющие тока холостого хода:
 ;
;определить сопротивление короткого замыкания:
 ;
;определить активную и реактивную составляющие сопротивления короткого замыкания:
 ;
;определить приведенное значение активного сопротивления обмотки ротора:
 ;
;определить критическое скольжение:
 ;
;определить номинальное скольжение sном:
определить величину магнитных потерь:
 ;
;рассчитать значения параметров, приведенных в таблице 8.5. для ряда значений скольжения s = 0,01; 0,02; 0,03; 0,045; 0,06 и для каждого из них выполняем расчет;
результаты представляем в виде таблицы 8.4;
по полученным данным построить рабочие характеристики двигателя (рис. 8. 5).
Таблица 8.3.

Таблица 8.4.
Расчетные формулы
Значения параметра при скольжении s, равном
0,01
0,02
0,03
0,045
0,06

Рисунок 8.5. Рабочие характеристики АД
Таблица 8.5.

Оформить отчет по практической работе.
Ответить на контрольные вопросы.
Сделать вывод о проделанной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
Что представляют собой рабочие характеристики асинхронного двигателя?
Что такое скоростная характеристика асинхронного двигателя?
Как повысить коэффициент мощности асинхронных двигателей?

ПРИЛОЖЕНИЕ









11
Источник
Трехфазный асинхронный двигатель
Целью работы является изучение работы асинхронного двигателя с короткозамкнутым ротором и снятие его механической и рабочей характеристик.
Краткие теоретические сведения
Простота конструкции, надежность в работе, экономичность и невысокая стоимость являются основными причинами широкого использования асинхронных двигателей в промышленности.
Частота вращения магнитного поля статора n1 определяется по формуле
n1 = , об/мин (1)
где f1 — частота сети, Гц;
р — число пар полюсов.
Разность в частотах вращения ротора n2 и поля статора n1 выражают скольжением
s = (2)
Скольжение возрастает с увеличением нагрузки на валу двигателя. У современных двигателей в зависимости от серии и назначения скольжение при номинальной нагрузке составляет 2…8%. При холостом ходе скольжение составляет всего 0,1…0,3%.
Если считать скольжение при номинальной нагрузке s н равным 5%, то можно указать частоты вращения ротора асинхронных двигателей при питании от сети с f = 50 Гц.
Таблица 1.
| Частота вращения при s н = 5% | Число пар полюсов на статоре |
| Поля статора n1, обмин | |
| Ротора n2, обмин |
Асинхронные двигатели малой и средней мощности, благодаря возможности соединения обмоток статора по схеме Y/Δ или Δ/ Y, могут работать при питании от двух соответствующих напряжений 380/220 В.
На заводском щитке двигателя это обозначается как
Y/Δ, 380/220 В.
Простейшим способом пуска в ход двигателя с короткозамкнутым ротором и номинальной мощностью до 100 кВт является непосредственное включение обмотки статора в трехфазную цепь.
Частота вращения ротора двигателя может быть выражена формулой
n1 = (1– s 1), об/мин. (3)
Электрическая мощность Р1, потребляемая асинхронным двигателем от сети, расходуется на полезную мощность Р2 на валу и потери мощности на нагрев обмоток статора и ротора ΔРэ1 и ΔРэ2, потери в магнитопроводе статора и в стали ротора от вихревых токов и на гистерезис ΔРст и на потери от трения в подшипниках ΔРтр.
Таким образом,баланс мощности в двигателе выразится так
Р1 = Р2 + ΔРтр + ΔРэ + ΔРст, Вт. (4)
Активная мощность двигателя, потребляемая из сети, вычисляется по формуле
Р1 = 3 Р1ф, Вт, (5)
где Р1ф = U1ф ∙ I1 – мощность одной фазы, измеренная ваттметром, Вт.
Механическая мощность, развиваемая на валу двигателя, Рмех складывается из полезной мощности на валу Р2 и потерь на трение Ртр
Рмех = Р2 + Ртр, Вт. (6)
Механическая мощность может быть определена по формуле
Рмех = 0,105М ∙n2, Вт, (7)
где М – вращающий момент, Нм;
n2 – частота вращения ротора, обмин.
Магнитные потери в магнитопроводе статора, т.е. потери в стали ΔРст, практически не изменяются при увеличении нагрузки на валу Р2 и называются постоянными.
С другой стороны, потери на нагрев обмоток статора и ротора, т.е. потери в меди ΔРэ зависят от нагрузки и называются переменными.
Коэффициент полезного действия асинхронного двигателя η определяется как отношение полезной мощности на валу Р2 к потребляемой из сети Р1
η = = (8)
Полезная мощность двигателя на валу Р2 может быть определена по формуле
Р2 = М ∙ ω = М ∙ , Вт (9)
или Р2 = 0,105 М∙n2, Вт. (10)
Тогда
η = = = , (11)
где U1ф, В; I1ф, А; Cos φф – напряжение, ток и коэффициент мощности фазы двигателя.
Р1 – потребляемая активная мощность двигателя.
Коэффициент мощности Cos φф зависит от нагрузки на валу двигателя и определяется отношением активной мощности к полной мощности фазы статора двигателя
Cos φф = = (12)
В лабораторной работе коэффициент мощности Cos φ измеряется непосредственно фазометром, а также может быть вычислен по показаниям ваттметра, вольтметра и амперметра, включенных в фазу двигателя (рис.1).
Основной характеристикой асинхронного двигателя, называемой механической, является зависимость n2 = f (M), т.е. зависимость частоты вращения ротора двигателя от вращающего момента (рис.1).
Рис.1. Механическая характеристика асинхронного двигателя.
Вращающий момент асинхронного двигателя определяют по формуле
М = , Нм (13)
где U1ф – фазное напряжение обмотки статора, В;
n1 – синхронная частота вращения магнитного поля статора, об/мин;
s – скольжение;
р – число пар полюсов;
R1, R2’, Хк – параметры схемы замещения асинхронного двигателя, Ом (рис.2).
Рис.2. Схема замещения асинхронного двигателя.
Вращающий момент асинхронного двигателя в лабораторной работе измеряется по щкале электромагнитного тормоза, соединенного с валом двигателя, в г∙см (1 Нм = 9800 г∙см).
Вращающий момент асинхронного двигателя зависит от величины подводимого к фазе статора напряжения в квадрате , скольжения s, частоты тока в статоре f1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
Меняя значение скольжения s при остальных постоянных в формуле вращающего момента можно получить различные значения моментов Мн, Мкр, Мп , показанных на естественной механической характеристике (рис.1) .
Номинальный вращающий момент Мн может быть определен по формулам
Мн = 9,55 , Нм (14)
или
Мн = 9,55 , Нм (15)
В каталоге на асинхронные двигатели указаны паспортные данные: Р2н, U1н, s н, n2н, Мн, Мкр/Мн, Сos φн и способ соединения обмоток статора.
Наиболее полно и наглядно свойства асинхронного двигателя выявляются с помощью рабочих характеристик.
К рабочим характеристикам относятся зависимость частоты вращения ротора n2, вращающего момента М, скольжения s тока фазы статора I1ф, коэффициента мощности Сos φ и к.п.д. двигателя от полезной мощности на валу Р2 при U1 = Const и f1 = Const.
При повышении Р2 величина скольжения s увеличивается, т.к. при увеличении нагрузки на валу частота вращения ротора уменьшается (рис.3).
Рис.3. Зависисмость величины скольжения от полезной мощности на валу.
При холостом ходе, когда Р2 = 0 , частота вращения ротора n2 может быть принята равной частоте вращения магнитного поля статора n1 и s = 0.
Так как Р2 ≈ Рмех , а Рмех = 0,105 М∙n2, то рабочая характеристика
n2 = f (Р2) подобна механической характеристике (рис.4).
Рис.4. Механическая характеристика асинхронного двигателя.
Вращающий момент М на валу ротора можно считать состоящим из полезного момента, расходуемого на совершение полезной работы, и момента холостого хода М0, расходуемого на преодоление трения. Эта доля вращающего момента практически не зависит от нагрузки на валу Р2.
Таким образом, можно считать, что М ≈ . Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n2 уменьшается при увеличении Р2, в связи с этим характеристика М = f (Р2) нелинейна и вращающий момент М быстро нарастает с увеличением Р2 (рис.5).
Рис.5. Зависимость М = f (Р2)
Кривая I1ф = f (Р2) подобна рабочей характеристике М = f (Р2) (рис.6).
Рис.5. Зависимость I1ф = f (Р2)
Если не учитывать ток холостого хода двигателя, составляющий 7…8% от I1ф , то ток в фазе статора пропорционален полезной мощности Р2 и увеличивается при ее повышении. При холостом ходе Р2 = 0 и I1ф = I10 (рис. 5).
При холостом ходе двигателя коэффициент мощности Cos φ двигателя мал и обычно не превышает 0,2, но затем при увеличении нагрузки на валу Р2 он быстро растет и достигает максимума при мощности, близкой к номинальной (рис. 6). Это происходит потому, что при возрастании нагрузки активная мощность Р1, потребляемая из сети, увеличивается, а реактивная мощность Q1 почти не изменяется. Вследствие этого главный магнитный поток практически остается постоянным. При нагрузках больше номинальных Cos φ снижается в связи со значительным ростом реактивных мощностей, связанных с влиянием потоков рассеяния.
Рис.6. Зависимость Cos φ = f (Р2)
Анализируя зависимость η = f (Р2) , можно видеть, что при изменении нагрузки на валу Р2 постоянные потери ΔРтр и ΔРст практически не изменяются, а начальный момент увеличение потерь в активном сопротивлении обмоток ΔРэ значительно меньше роста полезной мощности на валу. При Р2 = Р2н постоянные потери ΔРтр и ΔРст становятся равными переменным ΔРэ , а доля потерь в энергетическом балансе уже становится соизмеримой с Р2 . Вследствие этого к.п.д. начинает несколько уменьшаться (рис. 7).
Рис.7. Зависимость η = f (Р2)
План работы.
1. Ознакомиться с конструкцией асинхронного двигателя, типами измерительных приборов, устройством электромагнитного тормоза. В форму, предусмотренную отчетом по лабораторной работе, записать технические данные используемых приборов и электрооборудования.
2. Собрать электрическую схему (рис. 8) и предъявить ее для проверки преподавателю или лаборанту.
3. После проверки схемы поставить регулятор автотрансформатора (АТ) в положение «0» и включить выпрямитель.
4. Включить фототахометр и нажать кнопку «Пуск» на электрическом стенде.
5. При помощи автотрансформатора (АТ) изменить момент сопротивления электромагнитного тормоза в пределах 0…0,01 Нм (0,100.200,300,400,500,600,700,800,900,1000 г∙см).
6. Измерить по приборам следующие величины: напряжение на фазе двигателя U1ф по вольтметру V, ток в фазе I1ф по амперметру А1, потребляемую фазой двигателя активную мощность P1ф по ваттметру W, частоту вращения ротора n по фототахометру.
Измерения произвести для 11 различных моментов сопротивления на валу двигателя.
Данные опытов внести в табл.2.
Таблица 2
| № п/п | Измеренные величины | Вычисленные величины | |||||||||
| М Нм | U1ф В | I1ф А | P1ф Вт | n2 об/мин | Cos φ | М Нм | P2 Вт | P1 Вт | S1 ВА | Cos φ | s |
| … | |||||||||||
7. По окончании измерений нажать кнопку «Стоп», обесточить схему и показать результаты преподавателю.
8. После получения разрешения преподавателя разобрать схему.
9. По измеренным данным вычислить вращающий момент на валу двигателя М, Нм; полезную мощность на валу P2 , Вт; активную мощность, потребляемую двигателем P1 , Вт; полную мощность, потребляемую двигателем S1 ; скольжение s; коэффициент мощности Cos φ и коэффициент полезного действия η .
10. По измеренным и вычисленным данным построить на миллиметровой бумаге характеристики двигателя:
а) механическую характеристику n2 = f (M) ;
б) рабочие характеристики s = f (Р2); n2 = f (Р2); M = f (Р2); I1ф = f (Р2).
в) рабочую характеристику Cos φ = f (Р2) , измеренную и вычисленную.
11. Материалы измерений и вычислений, полученные ?